Graph-SCvx: Graph Successive Convexification for Deferred-Decision Trajectory Optimization
Transactions on Robotics (in preparation)
Abstract
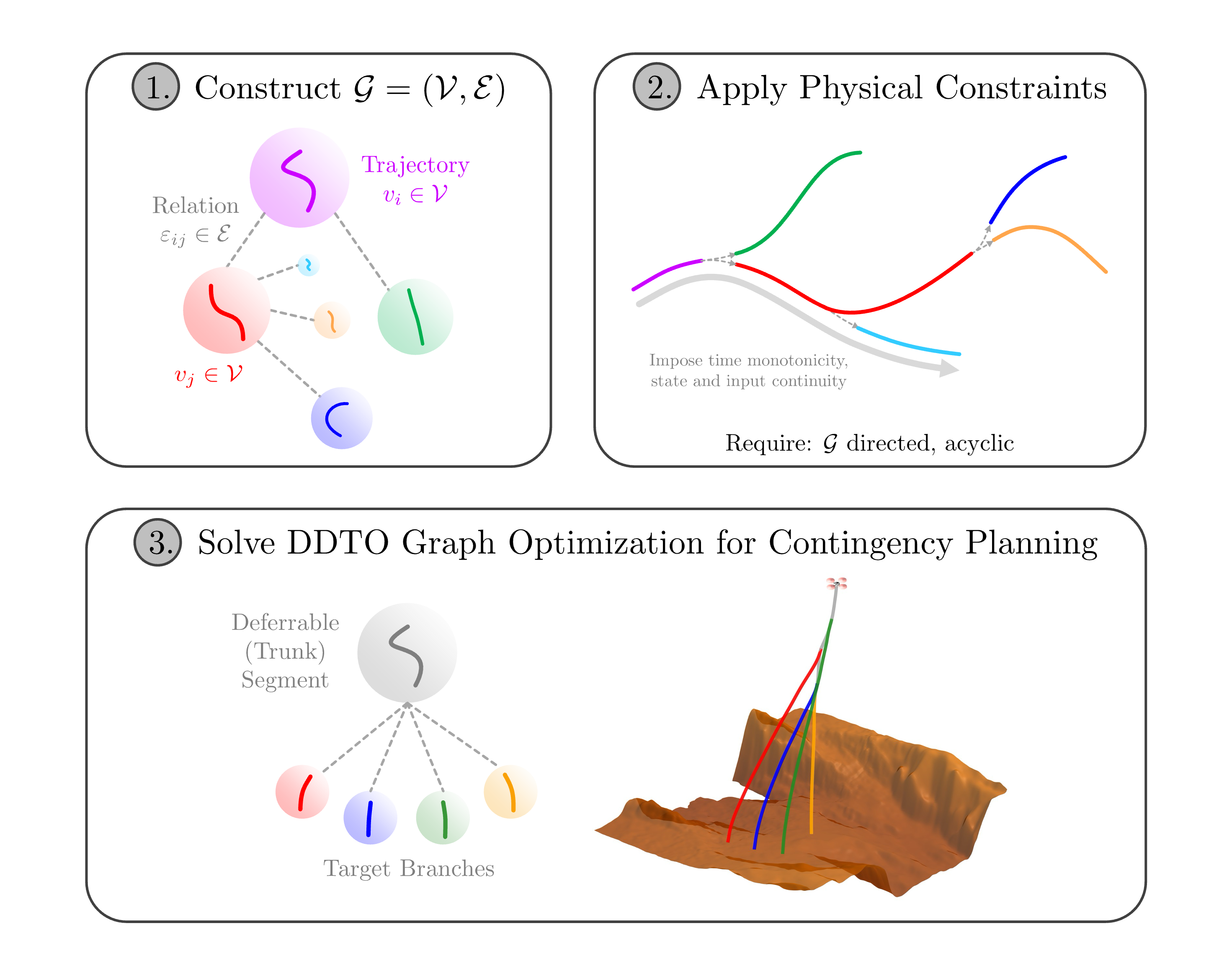
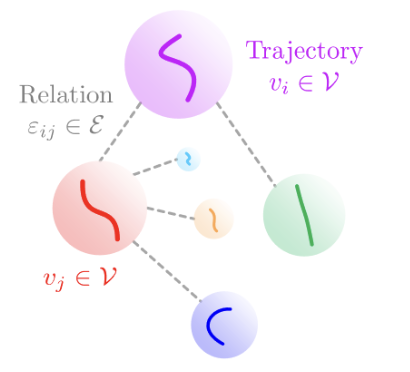
Autonomous exploration in unknown and dynamic environments poses many challenges for the design of safe and re- liable path planning algorithms. In such a scenario with multiple candidate objectives, an agent may prefer to defer the decision to commit to any particular objective until more information can be gathered. In this work, we propose a graph-based trajec- tory optimization formulation–graph successive convexification (Graph-SCvx)–and show how Graph-SCvx can be used to solve the deferred-decision trajectory optimization (DDTO) problem in real-time for various robotic tasks. The resulting Graph- DDTO model maximizes the duration for which reachability is maintained to a collection of target states, and is capable of flexible nonconvex path constraint specification building on the continuous-time successive convexification formulation. We demonstrate Graph-DDTO against a predecessor algorithm in a cluttered obstacle avoidance scenario for quadrotor flight, showing up to a 19× solve-time improvement. We then demon- strate Graph-DDTO’s efficacy in the autonomous soft landing problem, where a quadrotor must safely descend and land on unknown and hazardous terrain with perception-in-the-loop; Graph-DDTO outperforms benchmark comparison algorithms while achieving ≥ 95% success rate in all test environments. Finally, we perform quadrotor hardware demonstrations with dy- namic remote-controlled ground obstacles to demonstrate Graph- DDTO’s suitability for onboard implementation.(Buckner et al., 2026)
References
2026
- T-RO
 Graph-SCvx: Graph Successive Convexification For Deferred-Decision Trajectory Optimization2026In preparation to IEEE Transactions on Robotics (T-RO)
Graph-SCvx: Graph Successive Convexification For Deferred-Decision Trajectory Optimization2026In preparation to IEEE Transactions on Robotics (T-RO)