ACT-SLAM: Active Continuous-Time SLAM for Powered Descent Guidance Maneuvers
SciTech 2026 (Best Paper, GNC Student Paper Competition)
Abstract
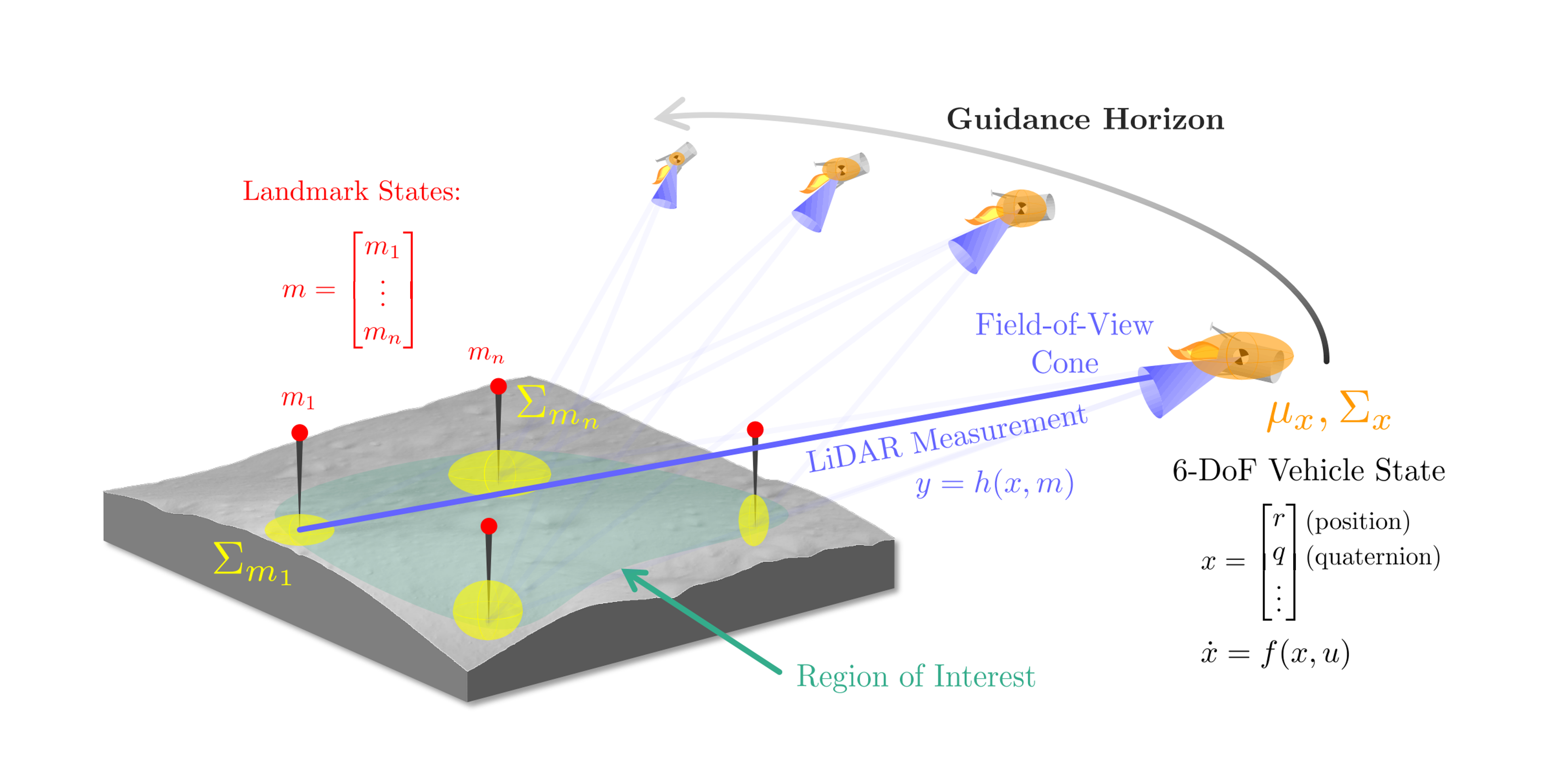
The problem of guidance-navigation co-design for autonomous aerospace systems concerns the simultaneous satisfaction of guidance and navigation requirements in mission & trajectory design, and is of keen interest for the realization of robust autonomy in the aerospace industry. In this paper, a general-purpose technique–Active Continuous-Time Simultaneous Localization & Mapping (ACT-SLAM)–is proposed to systematically and flexibly solve for various elements of guidance-navigation co-design and is specialized for scenarios involving spatial perception objectives. The resulting architecture makes use of advances in successive convexification for nonconvex trajectory optimization to solve the resulting problem at near-real-time speeds. ACT-SLAM is consequently demonstrated on the highly-constrained powered descent guidance (PDG) problem in a lunar environment with LiDAR-based measurements, showing promising results for joint reduction in vehicle and mapping uncertainty. Furthermore, rigorous satisfaction of both guidance and navigation requirements is shown through 3-sigma Monte Carlo analysis, and benchmark comparisons to several recent methods are made, demonstrating considerable improvements in terms of information-theoretic objectives.(Buckner et al., 2026)

References
2026
- SciTech
 Active Continuous-Time Simultaneous Localization & Mapping for Powered Descent Guidance ManeuversIn AIAA SciTech 2026 Forum, 2026
Active Continuous-Time Simultaneous Localization & Mapping for Powered Descent Guidance ManeuversIn AIAA SciTech 2026 Forum, 2026